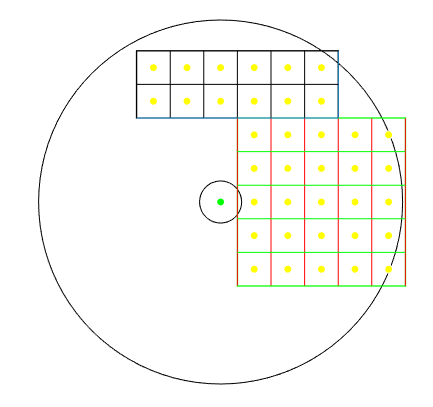
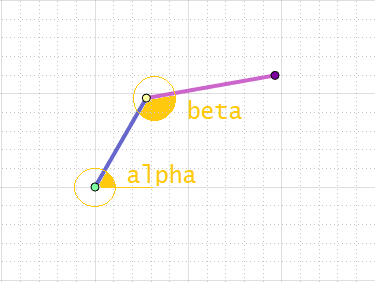
Both links are chained together.
One end of the Link_1 is pivoted to origin
The other end is jointed with Link_2
One end of Link_2, as mentioned above is pivoted to Link_1
The other end is assumed to be the tip of gripper
(on which a laser diode is mounted with focusing lens arrangement)
This mechanism will be referred as TL_RAM, as an abbreviation.
Length of Link_2 is 65mm
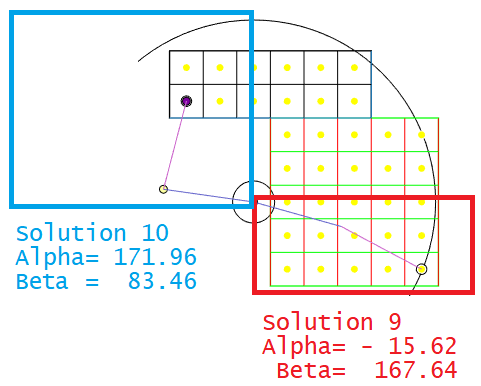
Beta: The clockwise angle between the "link-1" and link-2 is termed as beta (β)
Note: All angles are in degrees
Deleted old defination
Link_2 is Horizontal [0, L1] to [L2, L1]
In other words, for example:
Link_2 is Horizontal [0, 65] to [65, 65]
For some calculations, you can use this, as an initial position
dy = destination y