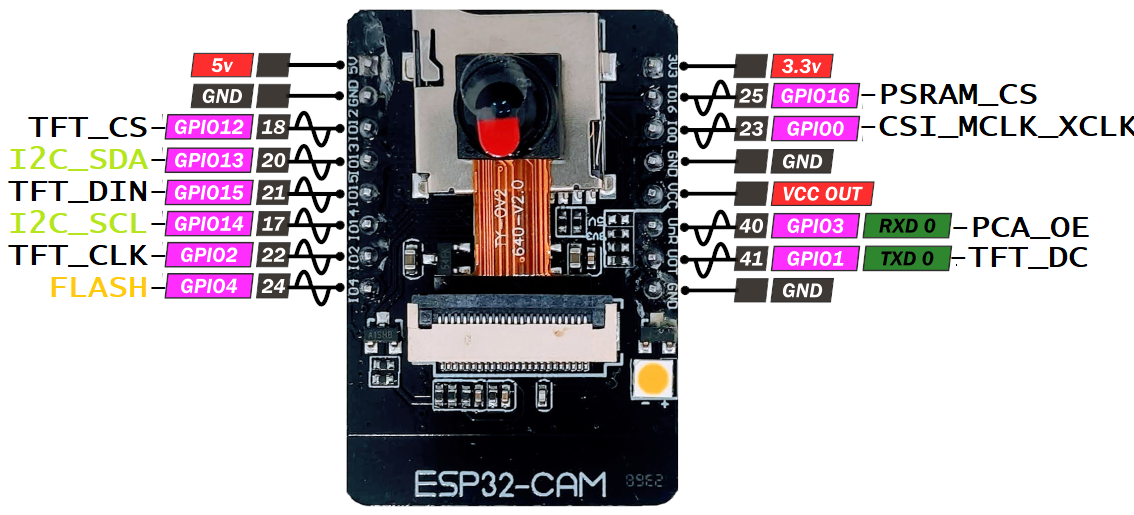
Pinout
TFT_CS GPIO12
TFT_DIN GPIO15
TFT_CLK GPIO2
TFT_DC GPIO01 TXD0
PCA_OE GPIO03 RXD0
FLASH GPIO4 [Solder Pad]
I2C_SDA GPIO13
I2C-SCL GPIO14
// Connect a push button to make OTA easy
PSRAM_CS GPIO13 [Solder Pad]
CSI_MCLK_XCLK GPIO0 [Solder Pad]
PCA_ENABLE_PIN_NO 3 // Fixed for TL_RAM PCB
LED_RED_INBUILD_PIN_NO 33 // Fixed for ESP32-CAM
LED_FLASH_INBUILD_PIN_NO 4 // Fixed for ESP32-CAM
To Do
- If not already done: Install (the latest version of ) ESP32 Board from Board Manager as shown in screenshot
- If not already done: Install (the latest version of ) Adafruit PWM Servo Driver library as shown in screenshot
- If not already done: Install (the latest version of ) TFT_eSPI library in Arduino IDE see screenshot
- Find the file the C:\Users\DELL\Documents\Arduino\libraries\TFT_eSPI\User_Setup.h
- Rename it to User_Setup_ORIGINAL.h
- Actually we need to replace the User_Setup.h with the modified User_Setup.h which has pin configuration according to our pin assignment decisions
- You must have the Camera Plate with ESP32-CAM and TFT display attached
- Upload the code 2023_07_14_a_Servo_Calib_Asm.zip
- Study the code carefully for Servo positions. It will be required during the robot assembly.