- MultiWii: Historic Home Page
- MultiWii: Wiki
- MultiWii: Download MultiWii_2.4
- MultiWii, some circuits and Question Answers: Berkely blog on RCgroups.com
YouTube Video: Data telemetry with MultiWii integrated nRF24L01
also view (optional)
YouTube Video: IMU telemetry via nRF24L01 ack payload (arduino) by the same author
Code:
- MultiWii_RF24.zip (Data telemetry with MultiWii integrated nRF24L01 )
- Android app that shows telemetry stuff (Android Studio project, plz don't ask for help with this!)
- Sketch for transmitter to go with above Android app. (Data telemetry with MultiWii integrated nRF24L01 )
Cloud Rocket
Adding nRF24L01based RX to MultiWii
Ans
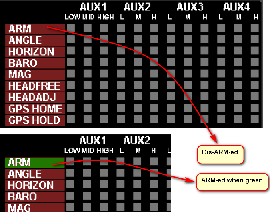
- DisARM the copter. (The MultiWii GUI will show if it is armed). There would be some mechanism to DisARM it; It may be a Joystick combination OR Special button on remote to ARM/ DisARM the copter, this function acts as described in the MultiWii Arduino code.
- Calibrate the Accelerometer: YouTube 00:17:00 to end of video (1_7) CRIUS MultiWii SE V2.5 Board - Initial setup and configuration
Ans
View the YouTube Video: Start Time: 00:04:00 to end of video
(4_7) MultiWii modes - radio, connection and software setup
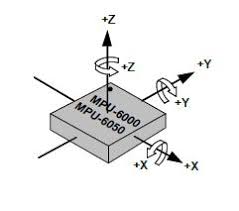
Ans: Example: What you think is X-axis in MultiWii GUI, is actually Y-axis on the GY-521 / MPU 6050. Here are some hints:
- From MPU6050 datasheet, refer this image. This image shows the manufacturer’s specifications of X, Y, Z axis w.r.t. MPU6050 silicon chip:
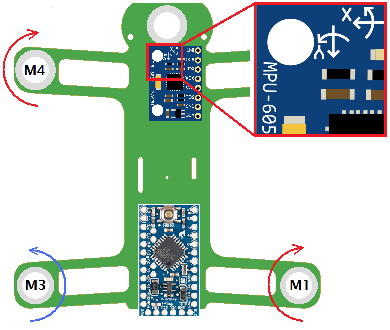
- Also check the physical orientation of MPU on the Quadcopter:
- Establish some relation between Quadcopter's (Roll, Pitch, Yaw) with X, Y, Z axis.
Example: Something like: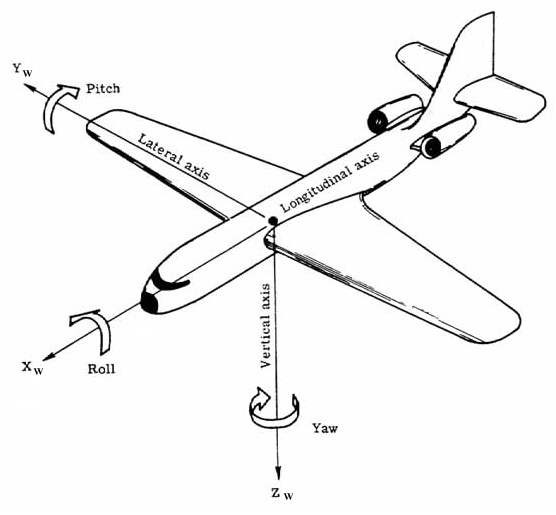
- HINT: In the MultiWii code, find the lines like:

and modify at the correct instance. These lines may be at multiple places in code, you need to figure out which onces will be complied for your quadcopter model. - After above modifications, connect Quadcopter with MultiWii GUI and see real-time data again. You might need to repeat the process, while it is done correctly.
Ans
Ans
Ans
Ans