| WR Home Topic Home | Chapter: 1 2 3 4 5 6 7 8 9 10 11 12 13 |
| <Previous | Next> |
Chapter 13
Page 16
Using the Index Sensor
Previously only colored circles were generated so the "sense of position" was not required. If patterns are to be made the propeller must know, where to start rendering the pattern?
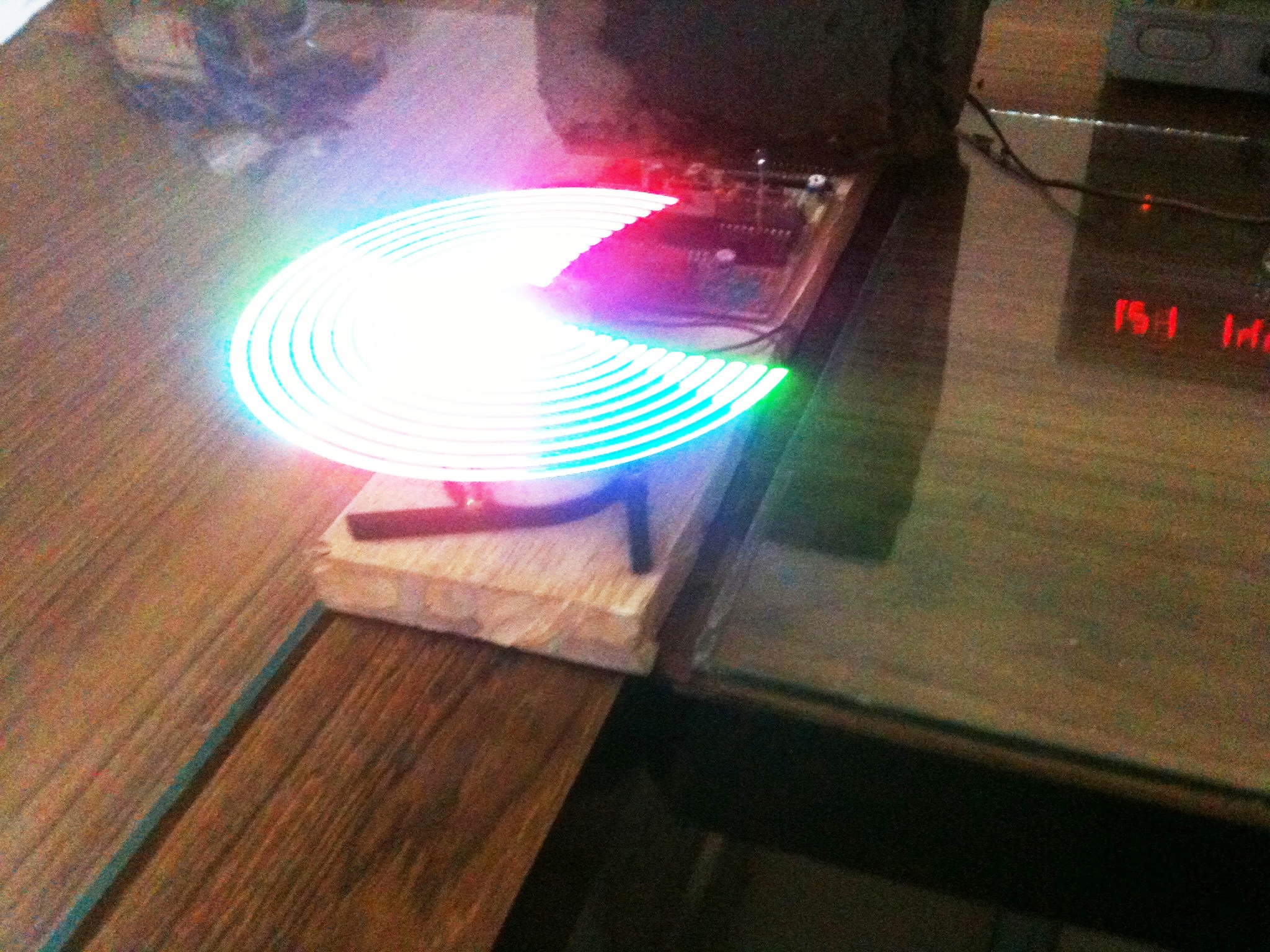
NOTE: Camera cannot be fooled easily by presistence of vision, it all depends on its shutter speed. The circles in the images were all full circles but camera cant pick it as a circle. The shutter speed must be slow to capture the full circle. So all images further will have this incompleteness.
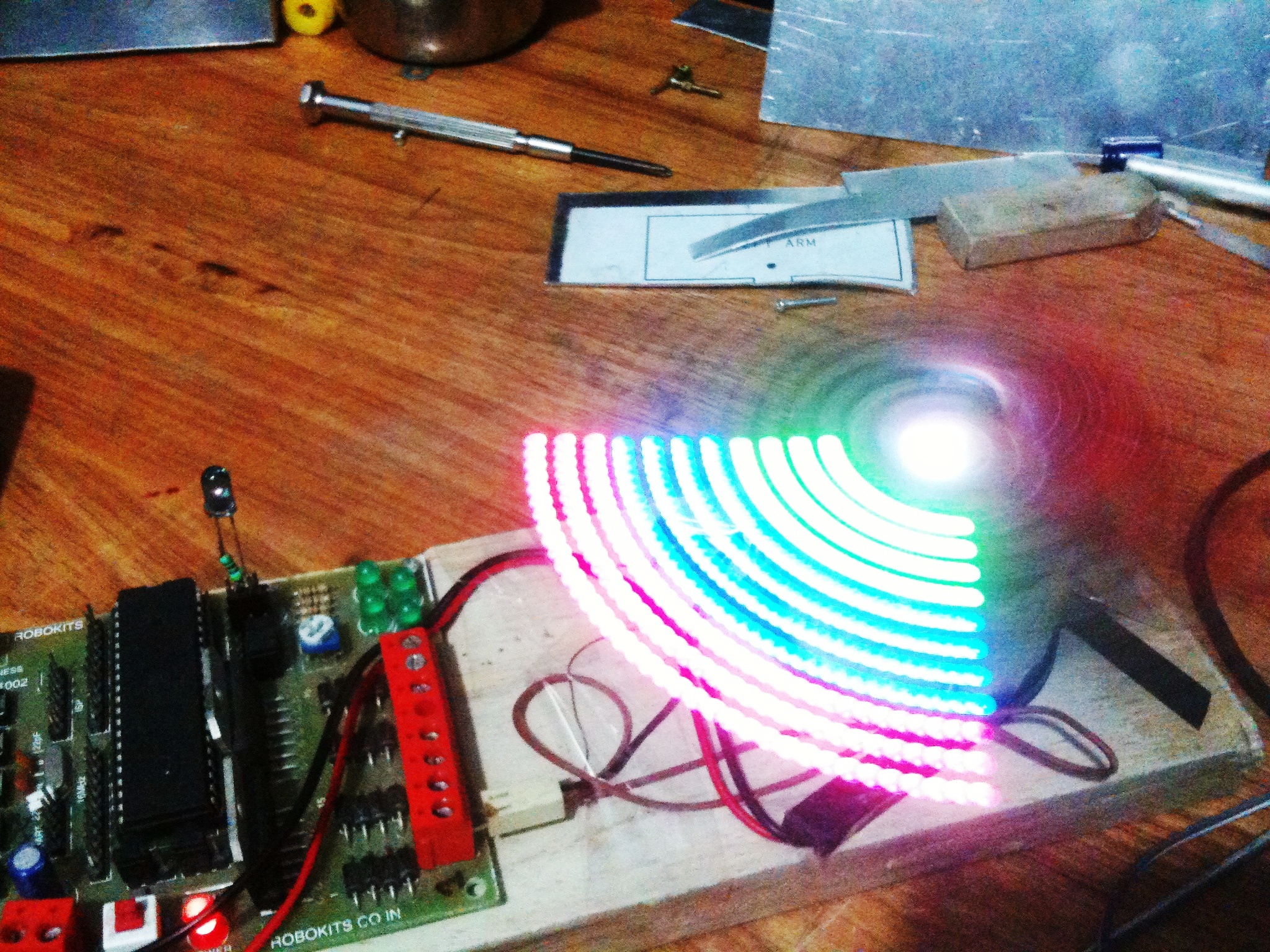
- The base was introduced with an IR LED and the propereller already contained a photo-diode. So whenever they cross each other, propeller knows that it has completed one round.
(Please click on an image to enlarge)
- Pie slice could be made as a pattern.




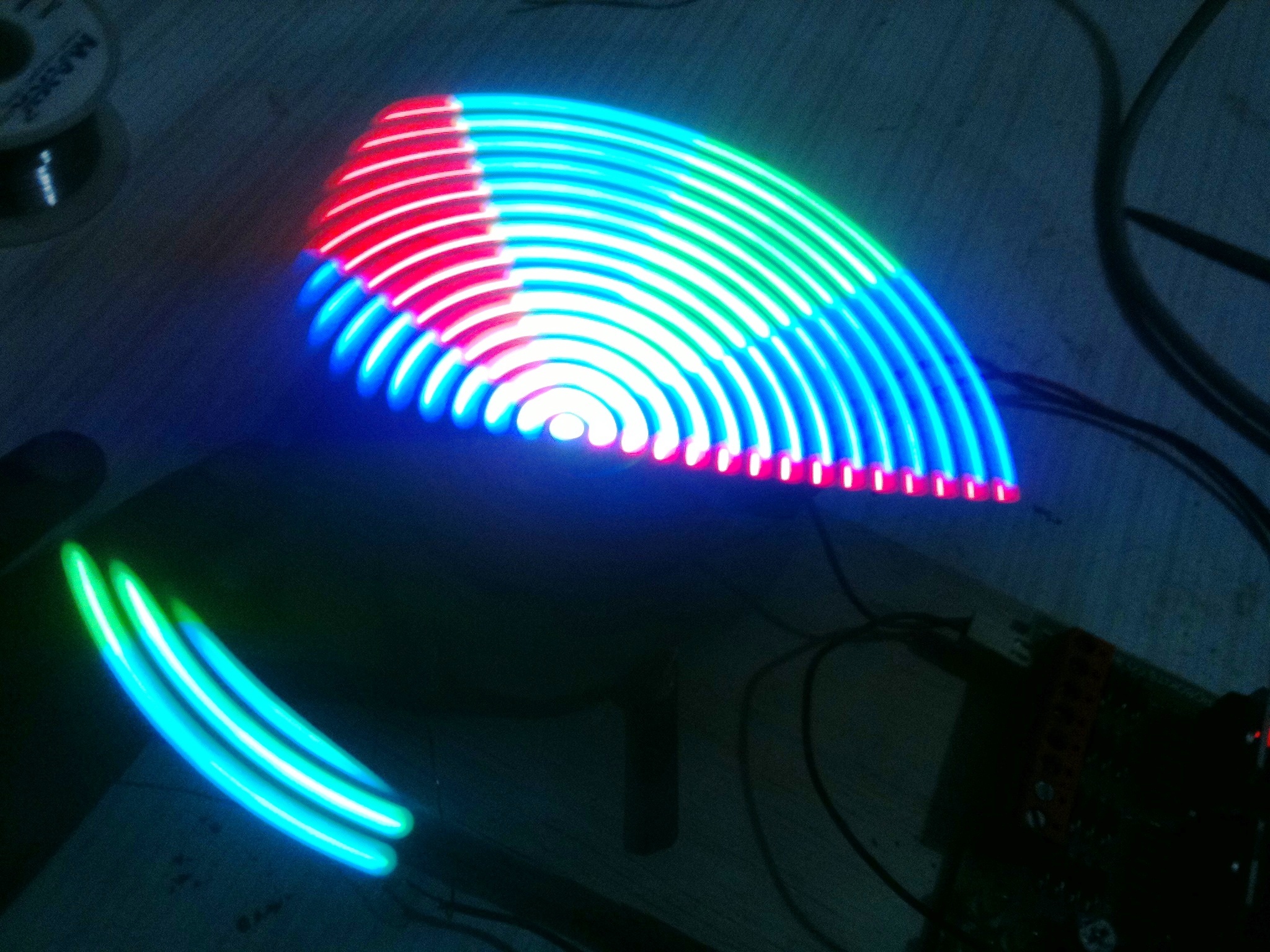
- Multiple colors in the same pie-slice: Time Division Multiplexing (TDM) was used


- Multiple Multi-colored Pie-slices










| WR Home Topic Home | Chapter: 1 2 3 4 5 6 7 8 9 10 11 12 13 |
| <Previous | Next> |