| WR Home Topic Home | Chapter: 1 |
| <Previous | Next> |
Chapter 01
Mechanical Hardware Development
Page 1
(Part-I: Introduction to the Two Link Robotic Arm Model)
Lets start with the name of the project, its TL-RAM-2 (pronounced as TL-Ram-two)
TL-RAM stands for Two Lnik Robot Arm Model and it is the Version-2. Talking about the versions, the Version-1 was more primitive and is discussed later.
Terminology
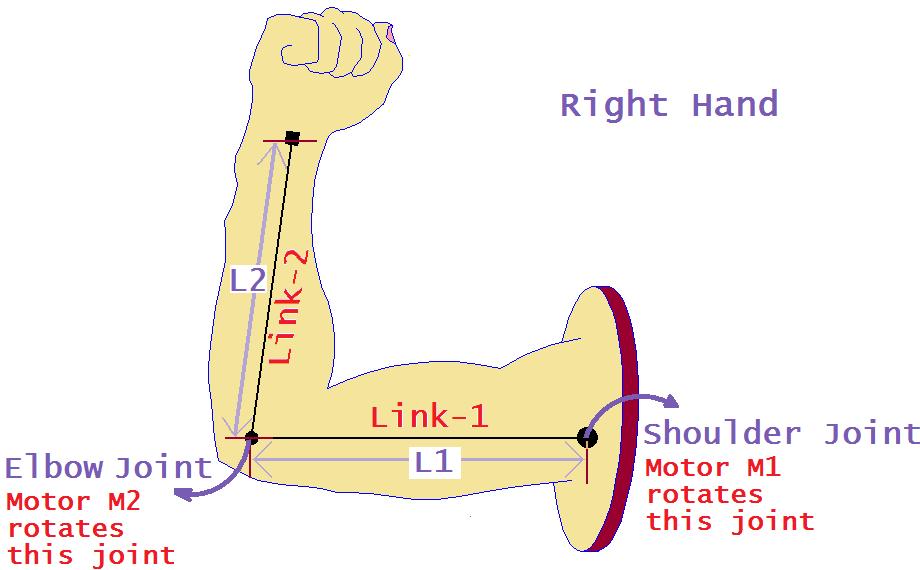
Link-1 It is the first link of the two-link mechanism. Just like a simple link it has two ends. One end is pivoted to the orign and the other is free to rotate. Its rotation is controlled by the motor-unit M1. M1 can rotate this link either in clock-wise direction or anti-clockwise direction. M1 resides at origin. On the free end of this link, another link called Link-2 is attached/pivoted. The length of Link-1 is denoted by L1
Link-2 It is the secondary link of the two link mechanism. The base of it is pivoted at the end of Link-1 through a motor-unit M2. The motor-unit M2 can rotate this link in either colckwise or anti-coclkwise direction. The other end of this link is free to rotate. The length of Link-2 is denoted by L2
M1 The base motor-unit is known as M1, it moves the Link-1 aka L1. The base motor-unit can be called as shoulder-motor-unit. The center of this motor-unit is at origin. The axis of this motor-unit is parallel to the z-axis and passes to origin (0,0) of the two-dimensional robot's co-ordinate system. The motor-unit has a limitation, its span of rotation is only 180 degree. Unlike the motor used in the table-fan which rotates round-and-round. But along with this limitation, it has one advantage, its position can be precisely controlled. For example: The motor unit can be commanded to move only 3-degrees
M2 This is the motor-unit connected to the other end (free-end) of the Link-1. This motor-unit is capable of rotating Link-2. But its own base position is depended on Link-1 as this motor is mounted on it (Link-1). It is analogous to the elbo joint of human hand.
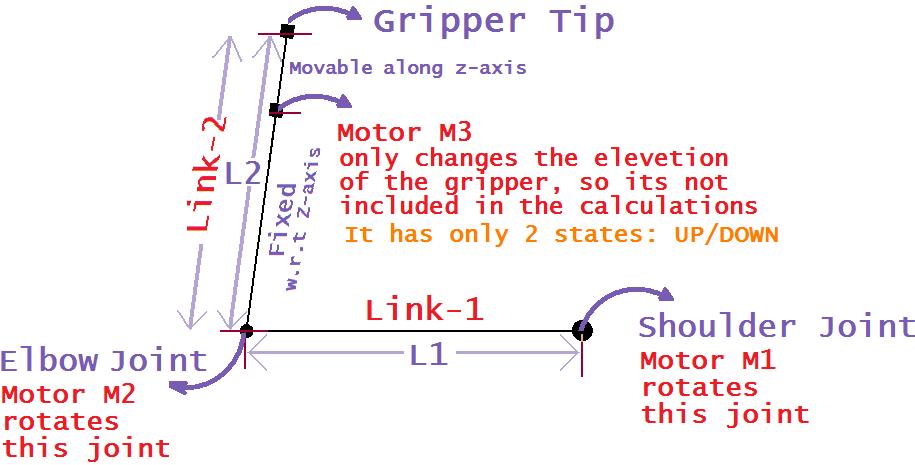
M3 This motor-unit divides Link-2 into two parts, fixed (hinged to Link-1) and movable (on which gripper is attached). M3 is responsible to move the gripper up or down along the z-axis (though not parallel to it).
TLRAM is a SCARA type of robot. Selective Compliance Assembly Robot Arm
For further reading please refer Serial manipulator on Wikipedia.
| WR Home Topic Home | Chapter: 1 |
| <Previous | Next> |