| WR Home Topic Home | Chapter: 1 2 |
| <Previous | Next> |
Chapter 02
Basics of Animation and Forward Kinematics
Page 13
Programming
So, it can be generalized that: For the purpose of graphical animation, if the joint J is rotated, then all the links which follows after, must be rotated to same degree and same direction.
In order to achieve it programmatically, a function rotate_motor_logically is developed. It is nammed rotate motor "logically" because it does not rotates the motor "physically", it rotates the co-ordinates in the matrix lx,ly only. Based on this function another function may be developed like rotate_motor_graphically, which might show a graphical animation. For now the function is limited to numeric use only.
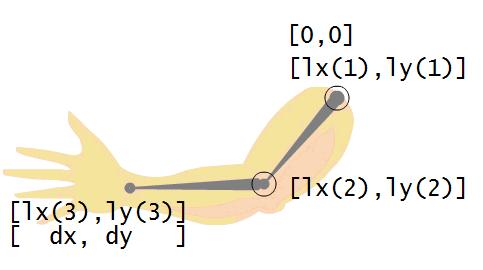
Also recall the matrix lx, ly:
Lets have a look at the parameters:
function [ successFlag, nlx, nly ] = rotate_motor_logically( motor_no, angleInDegree, lx, ly, debugFlag)
Input parameters:
- motor_no: Specifies which motor is to be rotated, valid values: 1 and 2.
Incase 1 is passed [lx(2), ly(2)] and [lx(3), ly(3)] are rotated
Incase 2 is passed only [lx(3), ly(3)] is rotated - angleInDegree: How much to rotate
- lx: Current, link x positions of the robotics arm
- ly: Current, link y positions of the robotics arm
- debugFlag: Prints all details to console, Set Verbose mode On or Off
- successFlag: TRUE(1) if the rotation was sucessfull
- nlx: Modified (new) lx
- nly: Modified (new) ly
The heart of the function, are the two equations:
x' = ( x - xc )cosθ - (y-yc)sinθ + xc
y' = ( y - yc )sinθ + (y-yc)cosθ + yc
Input Arguments:
motor_no = 1 angleInDegree = 90 lx = [0 110 110] ly = [0 0 140] debugFlag = 1
Function Called: [ successFlag, nlx, nly ] = rotate_motor_logically( motor_no, angleInDegree, lx, ly, debugFlag)
Output:
DEBUG: Before Rotating motor 1 DEBUG: lx[1] = 0.00 lx[2] = 110.00 lx[3] = 110.00 DEBUG: ly[1] = 0.00 ly[2] = 0.00 ly[3] = 140.00 DEBUG: After Rotating motor 1 by 90.000000 degree DEBUG: nlx[1] = 0.00 nlx[2] = 0.00 nlx[3] = 140.00 DEBUG: nly[1] = 0.00 nly[2] = -110.00 nly[3] = -110.00 successFlag = 1 nlx = 0 0.0000 140.0000 nly = 0 -110.0000 -110.0000
Click here to download the code.
Click here to view the code and sample command-line run.
A compelete working example, using the function is given on the next page.
| WR Home Topic Home | Chapter: 1 2 |
| <Previous | Next> |