close all; clear; clc;
global debugLevel_01;
debugLevel_01 = 1;
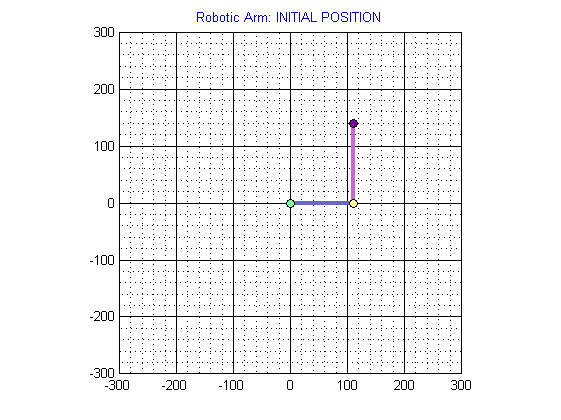
L1 = 110.0;
L2 = 140.0;
SUM_L1_L2 = L1 + L2;
initalizeArmCoordinates;
printArmCoordinates;
title_string = sprintf('Robotic Arm: INITIAL POSITION');
output_file_name = 'out_01_Initial_Position.jpg';
plot_properly;
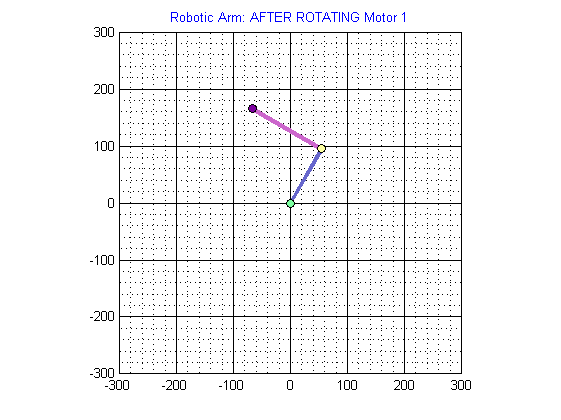
[ successFlag, lx, ly ] = rotate_motor_logically( 1, -60, lx, ly, 1);
title_string = sprintf('Robotic Arm: AFTER ROTATING Motor 1');
output_file_name = 'out_02_Rotate_M1.jpg';
plot_properly;
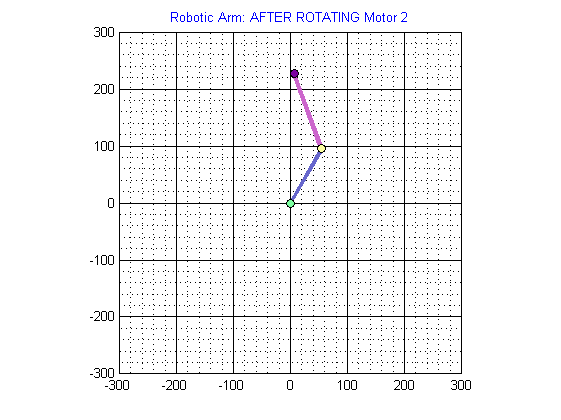
[ successFlag, lx, ly ] = rotate_motor_logically( 2, 40, lx, ly, 1);
title_string = sprintf('Robotic Arm: AFTER ROTATING Motor 2');
output_file_name = 'out_03_Rotate_M2.jpg';
plot_properly;
lx[1] = 0.00 lx[2] = 110.00 lx[3] = 110.00
ly[1] = 0.00 ly[2] = 0.00 ly[3] = 140.00
DEBUG: Before Rotating motor 1
DEBUG: lx[1] = 0.00 lx[2] = 110.00 lx[3] = 110.00
DEBUG: ly[1] = 0.00 ly[2] = 0.00 ly[3] = 140.00
DEBUG: After Rotating motor 1 by -60.000000 degree
DEBUG: nlx[1] = 0.00 nlx[2] = 55.00 nlx[3] = -66.24
DEBUG: nly[1] = 0.00 nly[2] = 95.26 nly[3] = 165.26
DEBUG: Before Rotating motor 2
DEBUG: lx[1] = 0.00 lx[2] = 55.00 lx[3] = -66.24
DEBUG: ly[1] = 0.00 ly[2] = 95.26 ly[3] = 165.26
DEBUG: After Rotating motor 2 by 40.000000 degree
DEBUG: nlx[1] = 0.00 nlx[2] = 55.00 nlx[3] = 7.12
DEBUG: nly[1] = 0.00 nly[2] = 95.26 nly[3] = 226.82