close all; clear; clc;
global debugLevel_01; debugLevel_01 = 1;
global L1; L1 = 110.0;
global L2; L2 = 140.0;
global SUM_L1_L2; SUM_L1_L2 = L1 + L2;
maximum_x_limit = ceil(SUM_L1_L2/100)*100;
maximum_y_limit = ceil(SUM_L1_L2/100)*100;
minimum_x_limit = - ceil(SUM_L1_L2/100)*100;
minimum_y_limit = - ceil(SUM_L1_L2/100)*100;
width = abs(minimum_x_limit) + abs(maximum_x_limit);
height = abs(minimum_y_limit) + abs(maximum_y_limit);
I = zeros(height, width);
debugLevel_01 = 0;
x_step = 4;
y_step = 4;
dy = maximum_y_limit;
for row = 1 : y_step : height
dx = minimum_x_limit;
for col = 1 : x_step : width
if isReachable( dx, dy ) == 1
I(row, col) = 1;
end
dx = dx + x_step;
end
dy = dy - y_step;
end
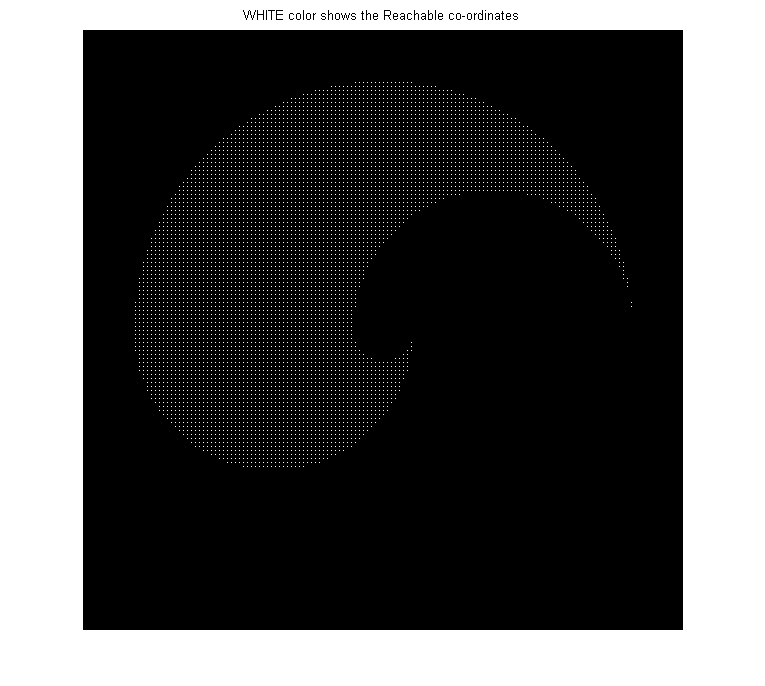
imshow(I);
title('WHITE color shows the Reachable co-ordinates');
saveas(gcf,'output.jpg')
J=I + 0.9;
imwrite(J,'background_bw.bmp');